Um robô que navega perfeitamente em pista lisa de laboratório pode falhar completamente em um pasto de agricultura familiar. Buracos, raízes expostas, lama sazonal e desníveis pronunciados exigem mais do que simples rodas — exigem um sistema de tração inteligente que adapte a potência de cada roda ao solo em tempo real. É exatamente isso que o sistema de tração 4x4 do Caatinga Rover foi projetado para entregar.
Este artigo é parte da série Como o Caatinga Rover Funciona. Leia primeiro sobre os sistemas de navegação e sensores.
Por Que 4x4 em Robótica Agrícola?
A tração 4x4 (ou 4WD — four-wheel drive) distribui a força motriz entre todas as quatro rodas simultaneamente. Em robótica, isso vai muito além do que significa em veículos convencionais: cada motor pode ser controlado de forma completamente independente, possibilitando manobras impossíveis em sistemas com eixo centralizado.
Essa arquitetura é fundamental em terreno agrícola por três razões práticas:
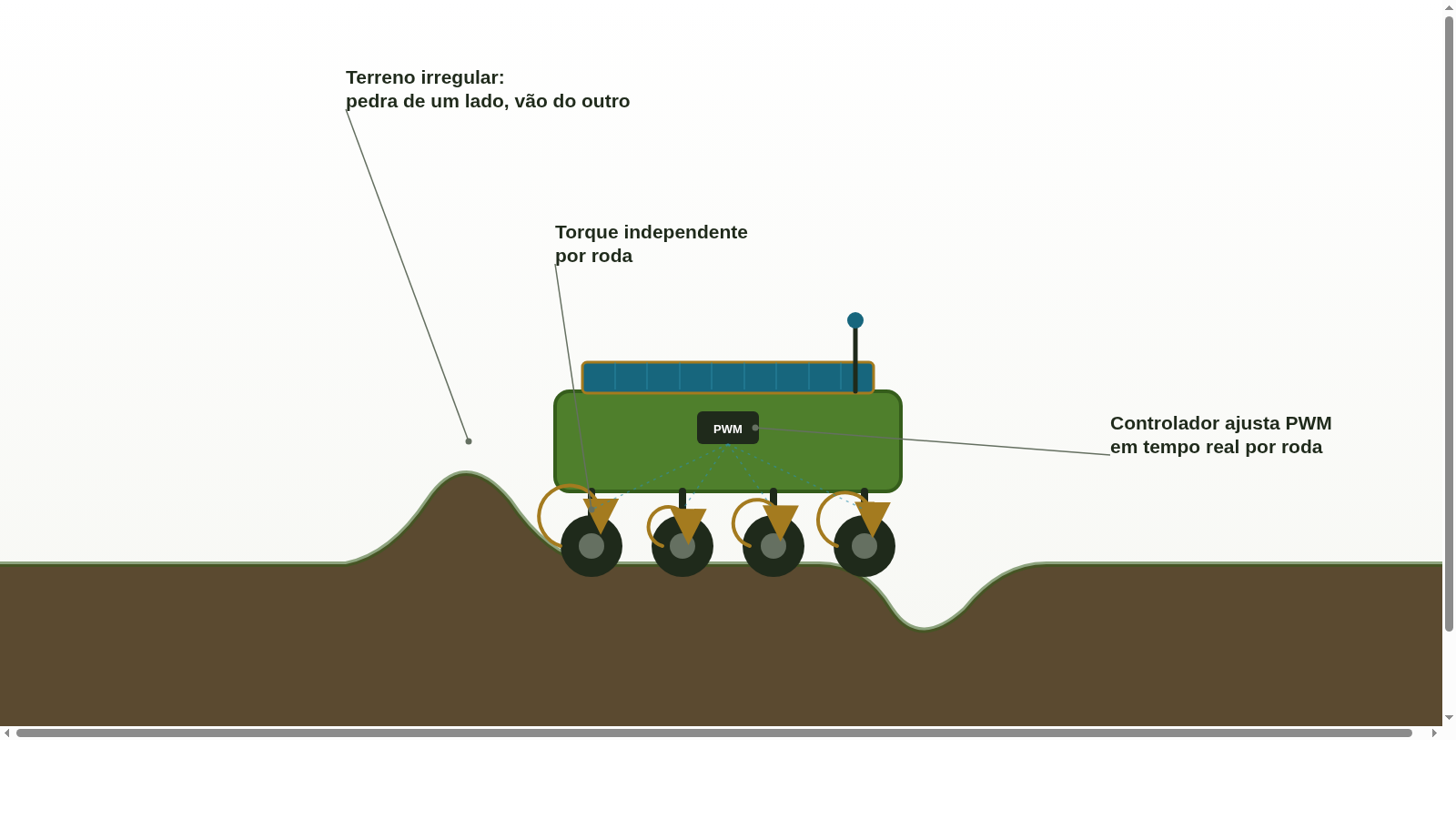
- Aderência variável por roda: uma roda pode estar em solo firme enquanto a oposta está em lama — o sistema precisa compensar em tempo real
- Curvas apertadas entre fileiras: para girar entre linhas de plantio sem danificar a vegetação lateral
- Controle em declives: manter velocidade constante em subidas e descidas exige controle diferencial preciso de torque
O Papel dos Drivers de Motor
Cada motor do Caatinga Rover é controlado por um driver (como módulos Motor Shield industriais ou pontes H de alta corrente) que recebe sinais PWM (Pulse Width Modulation) do controlador central. Esses sinais determinam, para cada roda individualmente:
- Velocidade: de 0 a 100% da potência nominal
- Direção: rotação para frente ou para trás
- Frenagem: por injeção de corrente reversa ou corte de alimentação
A escolha do driver é crítica: para robôs de campo com 4 motores de alto torque, componentes como o BTS7960 (suporta até 43A de pico) ou módulos industriais equivalentes oferecem margem de segurança que os populares L298N (2A por canal) não conseguem fornecer em operação contínua pesada.
Controle Diferencial: A Matemática da Curva
Para curvar sem deslizar ou danificar o solo, o sistema usa controle diferencial: as rodas do lado interno da curva giram mais devagar do que as do lado externo. Em uma curva de 90° em terreno plano, a diferença de velocidade pode chegar a 40% entre os lados. Em terreno irregular, o algoritmo ajusta esse diferencial dinamicamente com base nos dados de inclinação do IMU e na aderência estimada de cada roda.
"Em campo, um robô que não sabe ajustar o torque independente de cada roda simplesmente fica preso na primeira baixada."
Sistema Anti-Atolamento Inteligente
Um dos desafios específicos do Caatinga Rover é detectar e sair de atolamentos sem assistência humana — algo essencial para operação em campo remoto. O sistema monitora continuamente:
- Corrente consumida por cada motor: consumo excessivo sem movimento indica roda presa ou patinando
- Wheel slip detection: velocidade real (encoder) vs. velocidade comandada (PWM)
- IMU: a plataforma inteira está se movendo? A inclinação mudou?
Quando atolamento é detectado, o algoritmo executa uma sequência de manobras de desobstrução progressivas: oscilação frontal/traseira, transferência de torque para rodas com melhor aderência, recuo e retomada de rota alternativa. Somente se todas as tentativas falharem o operador é alertado via aplicativo.
Dimensionamento Mecânico: O Erro Mais Comum
Subestimar o torque necessário é o erro mais frequente em protótipos de robótica agrícola. O dimensionamento correto dos motores do Caatinga Rover considera:
- Peso total da plataforma com todos os equipamentos (câmeras, baterias, painel solar, implementos)
- Declividade máxima esperada no terreno de operação
- Coeficiente de atrito solo-roda em solo seco, úmido e lodoso
- Fator de segurança mínimo de 2x sobre a carga calculada
Um motor dimensionado "na conta exata" funcionará bem no laboratório e falhará no campo assim que a primeira chuva encharcar o solo.
No próximo artigo, explicamos de onde vem a energia para mover tudo isso: a arquitetura de alimentação com bateria e painel solar integrado do Caatinga Rover — e quanto tempo ele realmente consegue trabalhar.